
Find us at MECSPE 2026
30
F32
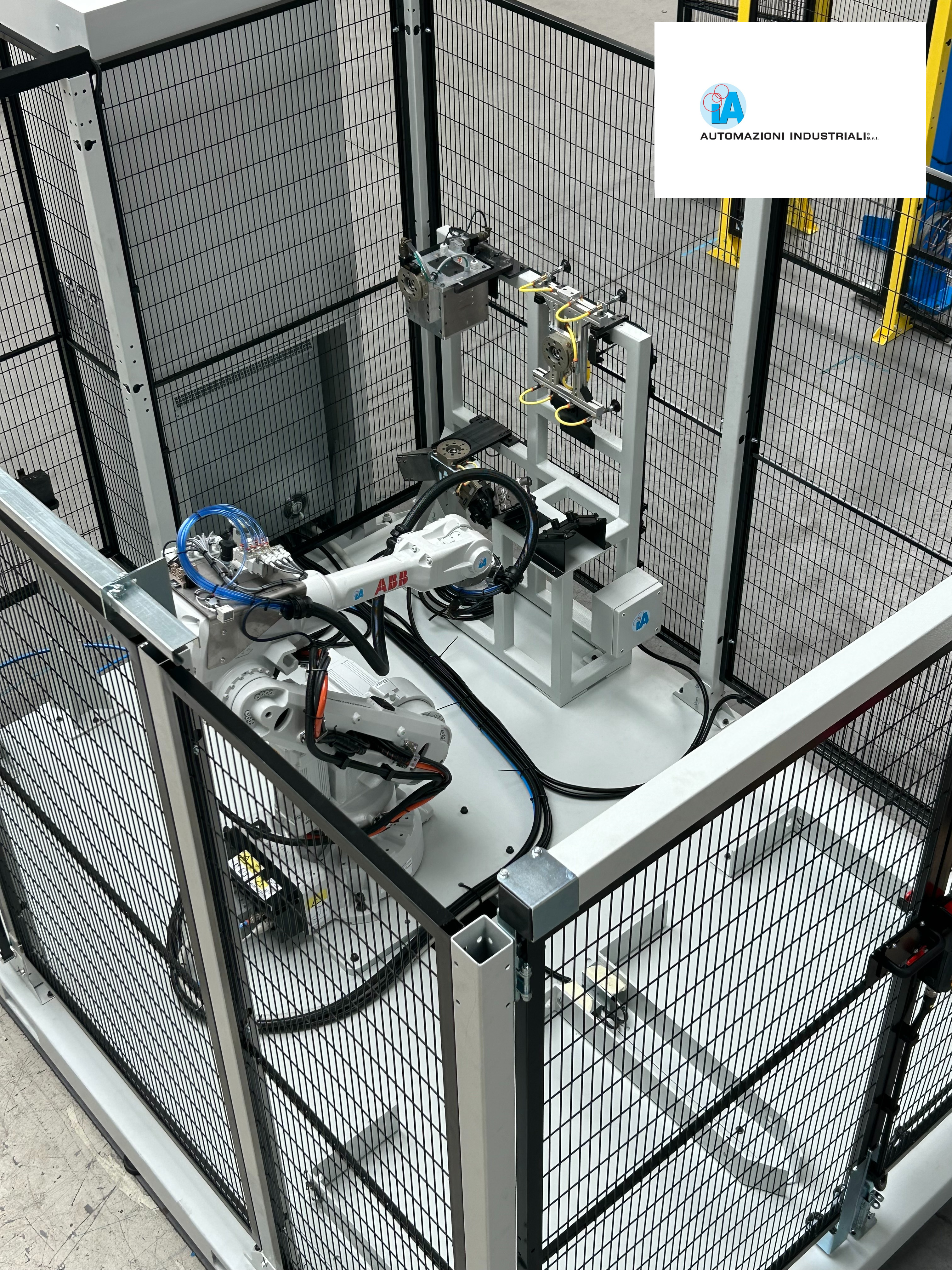
Impianto robotizzato carico/scarico CNC con sistema di visione DRS
Esposto in simulazione > PAD 30 STAND F32
Innovation Level:
Questa cella robotizzata è progettata per il carico e scarico automatizzato di una macchina utensile. Il sistema include un robot industriale ABB dotato di una pinza con sistema di visione 2D per localizzare e prelevare con precisione i pezzi disposti su pallet stratificati posizionati a terra. I pezzi sono separati da interfalde, che il robot gestisce autonomamente man mano che procede nello svuotamento di ogni pallet.
La cella include una stazione di cambio pinza, che consente al robot di sostituire l'organo di presa in base all'operazione da svolgere. Il sistema utilizza una pinza meccanica per la manipolazione dei pezzi durante il carico/scarico della macchina, una pinza per la telecamera dedicata alla scansione dei pezzi sui vari strati e una pinza a vuoto con ventose per il prelievo e la movimentazione delle interfalde una volta completata la lavorazione di uno strato.
L'intero impianto è racchiuso da una recinzione perimetrale di protezione per garantire la sicurezza dell'operatore ed è progettato per offrire flessibilità, precisione e continuità operativa in ambienti industriali.